DVS(Dynamic Vision Sensor,动态视觉传感器),又称事件相机(Event-based Vision Sensor),是一种全新范式的视觉感知器件。
它不再以"帧"为单位记录画面,而是让每个像素独立地、异步地感知光强变化——一旦变化超过阈值,立刻以微秒级延迟输出一个事件(包含坐标、时间戳与极性)。
这种以"运动"为核心的输出形式,使 DVS 在高速、强光照变化、低延迟、低数据率等严苛场景下展现出传统帧式相机难以比拟的优势,被广泛用于工业检测、机器人、自动驾驶、科学测量与人机交互等领域。
DVS 真正记录的不是"画面",而是画面中正在发生的"光强变化"
DVS 真正记录的不是"画面",而是画面中正在发生的"光强变化"。
它的设计灵感来自生物视觉系统。人眼视网膜上的感光细胞在受光后会将光信号转换为电信号,经双极细胞与神经节细胞处理后由视神经传递至视觉皮层;这一通路天生就对"变化"敏感,对静止背景几乎不耗费认知资源。
DVS 在硅基上模拟了类似的过程:入射光在像素内的光电二极管中转换为电流,再经 I/V 转换形成电压;亮度检测电路实时比较当前电压与参考电压的差值,一旦差值超过预设阈值,比较器立即触发一个事件——亮度上升输出"正事件",亮度下降输出"负事件"。整个过程在每个像素内独立闭环,无需等待全局曝光,因此能够以接近物理极限的速度感知运动。
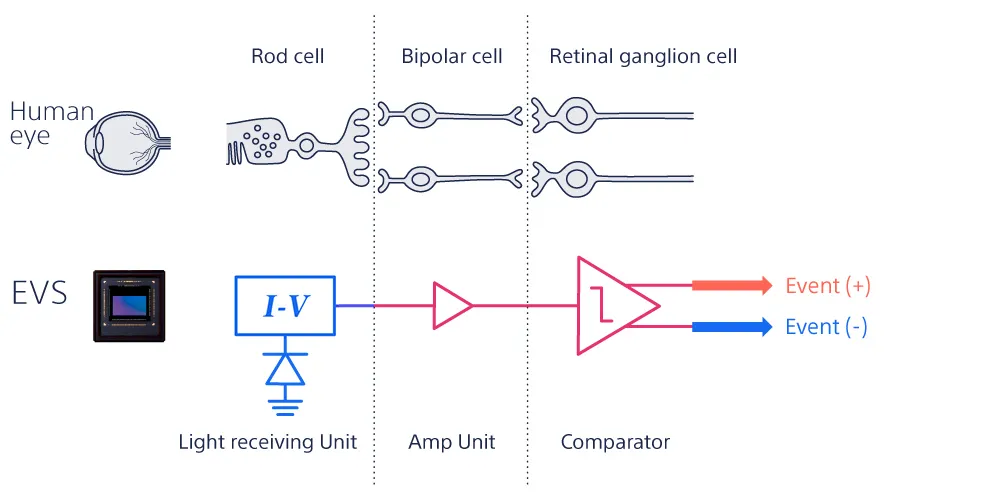
人眼视觉通路(上)与 DVS 像素信号链路(下)的仿生对应
每个像素独立异步运行,仅当亮度变化超过阈值时才输出事件
在 DVS 内部,每个像素都拥有自己独立的"感光—检测—判决"链路,所有像素之间完全异步、互不阻塞。当某个像素感受到的光强变化超过阈值时,该像素就会立刻向输出总线申请发出一个事件;事件由 (x 坐标, y 坐标, 时间戳 t, 极性 ±) 四元组构成,是 DVS 唯一的输出形式。
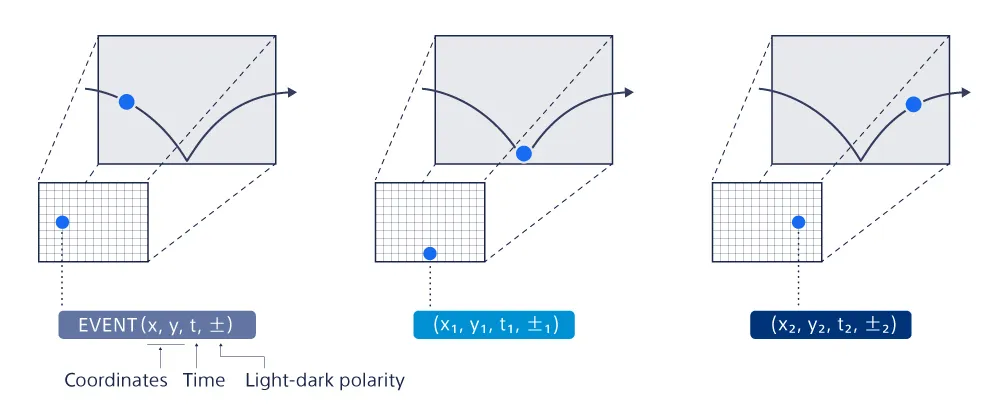
DVS 的输出由 (x, y, t, ±) 四元组构成:坐标、时间戳与极性
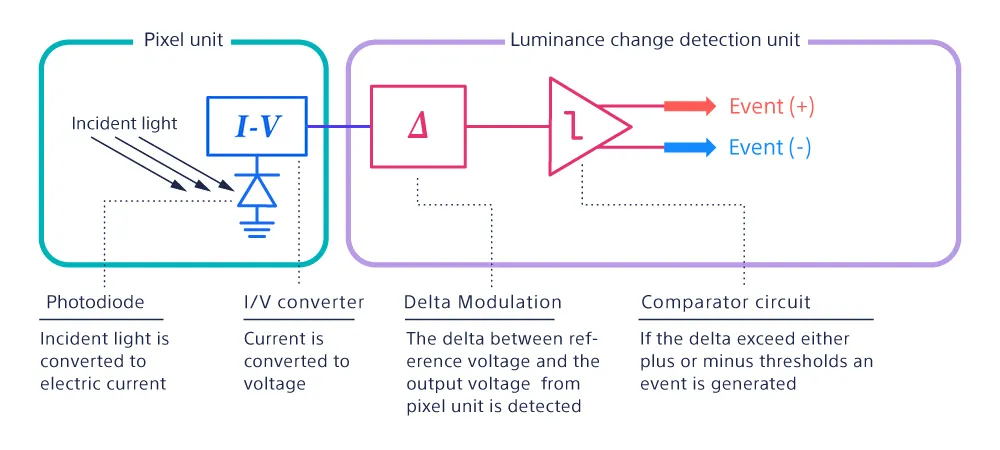
对单个像素来说,事件触发遵循「自适应基线 + 双向阈值」机制:系统初始化时设定参考电压与正、负阈值;当光强变化导致电压突破任一阈值时,像素立即输出对应极性的事件,随后参考电压重置为当前值,阈值随之滑动更新,准备捕捉下一次变化。
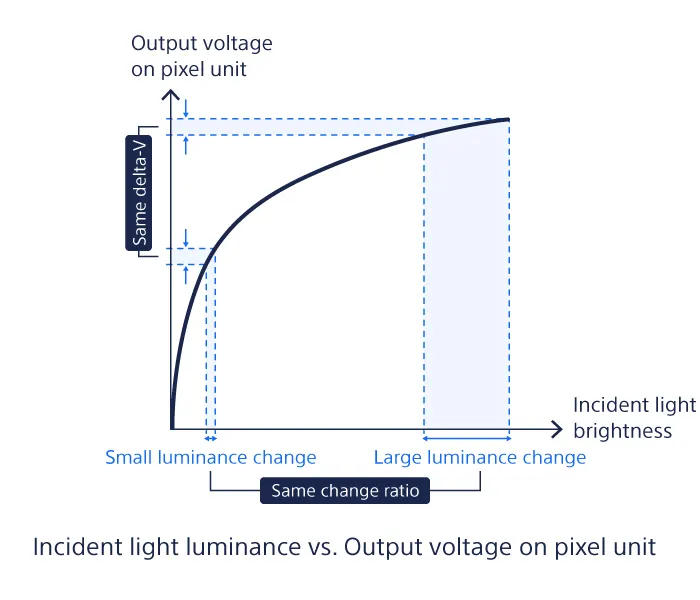
这种"自适应基线 + 双向阈值"的机制,使 DVS 对亮度的相对变化率敏感而非绝对亮度。配合像素采用的对数响应曲线(输出电压随入射光强呈对数增长),DVS 在弱光下能分辨极细微的亮度差异,在强光下又不会饱和,从而获得超过 120dB 的等效动态范围——同一台相机可以在隧道出入口、强逆光、夜间车灯直射等极端场景下持续稳定工作。
正因为 DVS 只输出"正在变化"的像素,最终成像呈现出一种独特的"轮廓化"效果:静止的背景被自然过滤,运动物体的边缘被高时间分辨率的事件流清晰勾勒。在车载、机械振动、流体监测等场景中,这种成像形式天然契合"我们只关心运动"的应用需求。
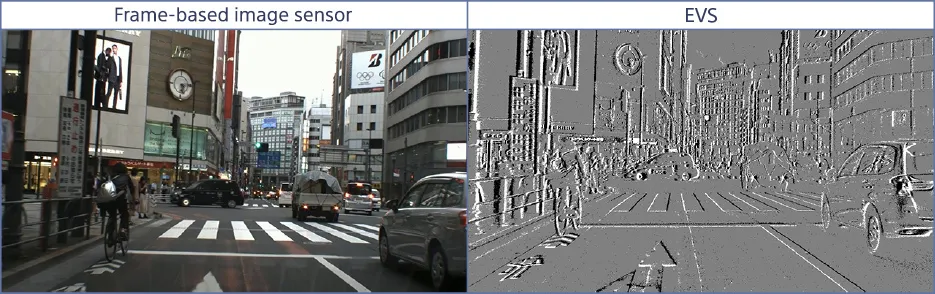
同一车载场景下,左:传统帧式相机完整画面;右:DVS 仅保留运动物体的轮廓事件流
DVS 在各种场景下的典型应用示例
DVS 以微秒级时间分辨率逐颗捕捉液滴轮廓,喷射姿态清晰可见
DVS 仅响应运动产生的亮度变化,无论衣物颜色与背景如何,行人轮廓始终清晰且不输出冗余背景
DVS 凭借宽动态范围逐颗捕捉火花飞溅轨迹,且不输出静止机械部件等无关数据
DVS 仅捕捉激光扫过物体表面时的反射光变化,背景几乎无输出
DVS 只对发生位移的边缘区域响应,振动模式被自然可视化
DVS 以连续事件流记录运动轨迹,时间维度上无空缺
DVS 正在改变工业检测、机器人、监控和科学研究等领域
DVS 善于在运动中发现微小变化。当被检产品在产线上传送时,划痕、污渍、异物所引起的亮度差异会立刻被 DVS 捕捉为事件流。相比 RGB 相机依赖颜色对比、对光照敏感且数据量庞大,DVS 直接输出带坐标与时间的差分数据,体积小、速度快,并可与机器学习模型无缝结合,为自动化在线检测提供低带宽、高吞吐的视觉前端。
旋转机械、传送系统、机器人关节等部件的异常通常表现为微小的位移变化或振动模式偏移。DVS 能以微秒级延迟捕捉这些变化并保持极低数据量,使长期连续监测成为可能。结合机器学习对正常工况建模,可实时预警轴承磨损、皮带打滑、机械臂偏移等异常,支撑预测性维护。
自主移动机器人对响应速度与功耗高度敏感。DVS 将物体的运动直接转化为轮廓事件,让机器人可以在毫秒内感知障碍物位置变化,无需等待整帧图像。它特别适合配送机器人、AGV、无人配送车以及护理机器人,在弱光、强光突变与高速场景下均可稳定工作。
DVS 仅记录光强变化,不形成可识别的人脸、肤色或服饰细节,天然具备"隐私友好"属性。结合超宽动态范围,它可在医院走廊、养老机构、卫生间外、夜间通道等帧式相机难以胜任的环境下持续监控人员动态。与 RGB 或红外相机融合后,可在不牺牲隐私的前提下,构建更精细的安全分析系统。
科研场景常需观察高速、低对比、长时间的动态过程,DVS 能够仅在"事件发生时"产生数据,既保证时间精度又显著降低数据存储压力。在用户行为与人流研究中,由于 DVS 不获取可识别图像,调研可在保护被研究者隐私的前提下长期开展。
手势、眼动、面部表情等微动作的核心信息都集中在"变化"中。DVS 以像素级、微秒级捕捉这些变化,配合 ToF、RGB 相机可实现低延迟、低功耗的手势追踪与目光跟随,是 AR/VR 头显、可穿戴设备和智能座舱交互的理想视觉输入。